ROS学习笔记(1):ROS的安装

介绍
ROS - Robot Operating System The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS has what you need for your next robotics project. And it's all open source.
ROS 是一个适用于机器人的开源的元操作系统。
它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。在某些方面ROS相当于一种“机器人框架(robot frameworks)”
安装
本人系统系统环境:Ubuntu20.04(笔记本电脑双系统 Windows11 + Ubuntu20.04)
对于Ubuntu20.04安装,大家可以自由选择,使用 VMware 或 双系统,都是可以的。本人不再详细讲解这一部分了。
如果有刷双系统的想法,可以使用Venroy刷哈!记住,一定要分区哈,别把Windows的数据搞丢了。 详细教程:Ventoy制作启动盘
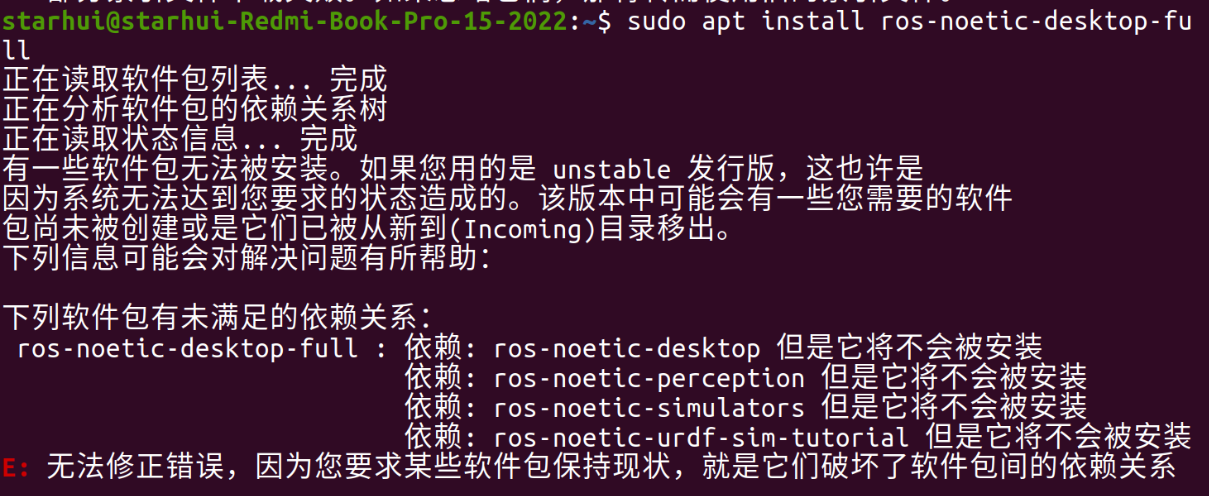
此时源为阿里云。不会换源的,请百度/Google!!!
注意:清华源的时候后续可能在安装 sudo apt install ros-noetic-desktop-full 的时候遇见依赖问题,无法安装。因为,我自己就是这种情况,换源为阿里云就好了。
添加ros源及其密钥
在终端输入
1 | sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' |
然后添加密钥
1 | sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |
添加完源后记得更新一下
1 | sudo apt-get update |
安装ROS
咱们采用的是完整桌面版安装
1 | sudo apt install ros-noetic-desktop-full |
注意:ubuntu20.02对应的ros版本为noetic。可自行百度ubuntu对应ros型号。
配置ROS
配置环境变量
首先配置一下环境变量,方便在终端使用。
1 | echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc |
安装依赖并初始化
首先安装一下依赖
1 | sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential |
然后初始化
1 | sudo rosdep init |
但是会报错,如下图

这个是由于网络原因,Github Raw被墙了,国内无法访问。
自己解决的话较为麻烦,咱们可以用鱼香ros写好的工具,一键初始化并更新。
1 | sudo pip install rosdepc |
这样就安装好了,最后咱们测试一下
ROS测试
首先打开一个终端启动 ROS 的核心节点,它管理 ROS 系统中的名称服务和参数服务器,是运行 ROS 系统所必需的.
1 | roscore |
这样就表示运行成功了。
接下来在打开一个终端,启动海龟画面
1 | rosrun turtlesim turtlesim_node |
再打开一个终端,启动键盘控制子程序
1 | rosrun turtlesim turtle_teleop_key |
然后按上下左右四个键控制乌龟移动。
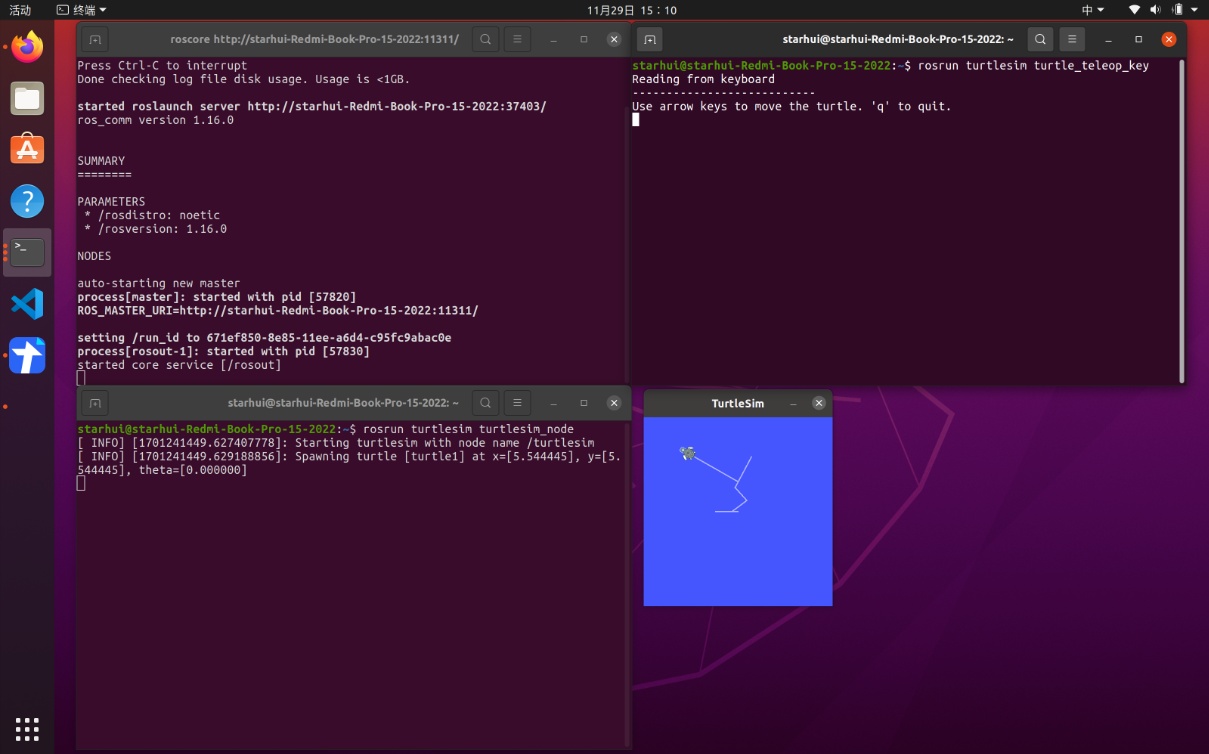
注意:记得把光标聚焦到键盘控制的那个终端,要不然无法使用方向键控制海龟移动。
- Title: ROS学习笔记(1):ROS的安装
- Author: StarHui
- Created at : 2023-11-29 18:28:36
- Updated at : 2023-11-29 19:31:15
- Link: https://renyuhui0415.github.io/post/ros_study_notes_1-ros_installation.html
- License: This work is licensed under CC BY-NC-SA 4.0.